by Enrico Felici
Underwater archaeological science explores the remains lying in a submerged environment as well as artefacts connected with navigation and all the activities related to an aquatic environment, regardless of their current location. It also aims at investigating the coastal environment – consisting of the submerged strip and the corresponding air space with their fluctuating borders – and the connected anthropic activities. Such kind of researches basically apply to two main categories: shipwrecks and coastal settlements.
Underwater archaeology today operates globally throughout a broad chronological range and, therefore, it requires a wide gamut of specialized skills. Accordingly, the Rule 22 of the Appendix to the UNESCO Convention on the protection of underwater cultural heritage (Paris 2001; in Italy, Law n. 157/2009) requires that all activities be conducted by «a qualified underwater archaeologist with scientific competence», i.e. that the professionalism of the operator as well as the documentation and excavation techniques have to be appropriate to the project. Only archaeological prospections and surveys carried out by underwater archaeologists can ensure the highest level of reliability. Unfortunately, this is hardly attainable on a large area and under unfavourable conditions, such as high water depth, low temperature and high costs. Thus, since the beginnings of underwater archaeology research, first analogical and later digital remote sensing methods have been tested and improved.
During research campaigns carried out in the 1930s by Antoine Poidebard in the port of Tyre, the methodology for surveying coastal environments was based on aerial photography, direct prospecting by surface-supplied divers and underwater photography. Aerial photography is chiefly used to render (with calm sea) a pseudo-planimetric view of coastal archaeological remains; moreover, by comparing shots taken over time, it is possible to detect natural changes in the coastline, as well as those caused by direct and indirect anthropic impact.
As to submerged contexts, the turning point occurred in 1943, when Jacques Y. Cousteau and Emile Gagnan invented the SCUBA, which allowed divers full autonomy and freedom of movement. The earliest archaeological use of the SCUBA is reported in the prospection on the Mahdia shipwreck, directed by Jacques-Yves Cousteau, Antoine Poidebard and Philippe Taillez (1948). Soon after, other shipwreck excavations were started. At the beginning, however, the inadequacy of prospection instruments had severe negative effects: due to the depth, Nino Lamboglia’s survey on the Albenga shipwreck (1950) had to be conducted by surface-supplied divers; in order to determine the wreck’s extent and consistency, Lamboglia decided to use a mechanical grab bucket: a choice that he later regretted. The excavation of the Grand Congloué (1952) was carried out by SCUBA divers, led by J.-Y. Cousteau; however, their failure to properly carry out the archaeological survey undermined director Fernand Benoît’s correct interpretation of the context as an overlap of two distinct shipwrecks.
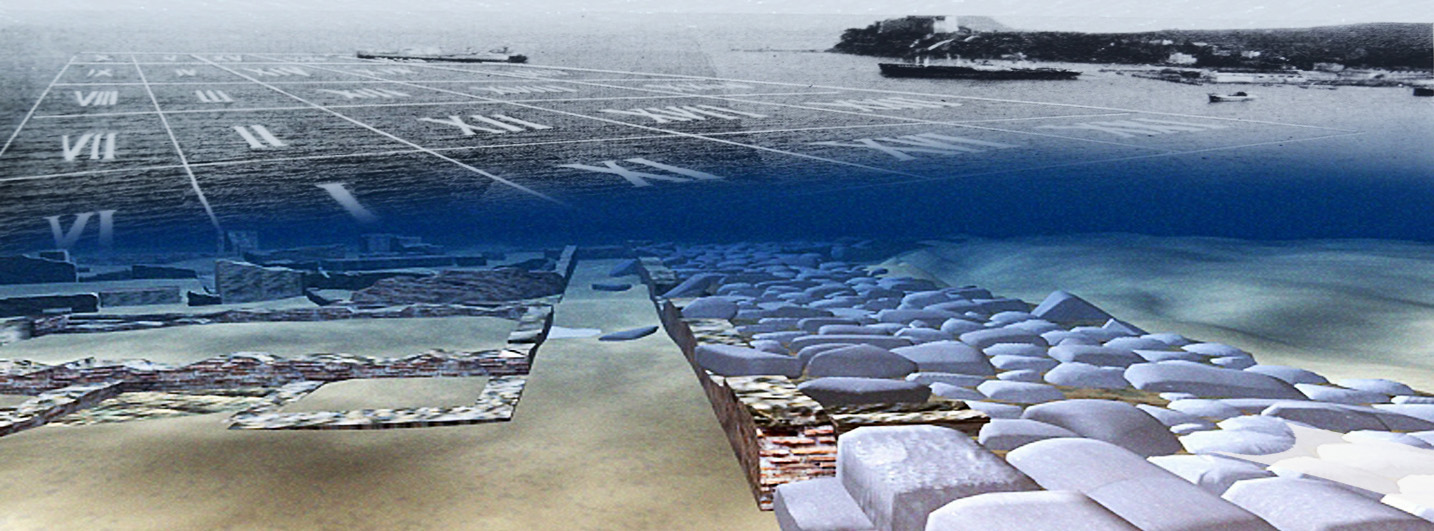
It was evident that the era of the ‘blind directors’, who directed the excavation from the boat, should end and methodologies and equipment designed for underwater work were needed. Capt. Ph. Taillez made one of the earliest remote sensing experiments on the Titan shipwreck (1957), while Nino Lamboglia and Gianni Roghi tested the photomosaic as a plan, in combination with the survey grid, on the Spargi shipwreck (1958). The use of the echo sounder as a prospecting tool is also one of Lamboglia’s contributions.
Current digital systems for remote sensing and photogrammetry have developed, based on photography and sonar technical principles. The Sonar (Sound Navigation and Ranging) is based on the repeated emission of sounds or ultrasounds. The seabed reflects them, the device records the echoes and measures the return time: based on the speed of the sound in the water, it determines the distance from the obstacles and translates it graphically into a sonographic profile of the seabed. From this principle, three instruments have evolved, which have to be used in combination with the on-board instruments, in particular with RTK differential GPS. The Side Scan Sonar employs a so-called ‘fish’ towed by a boat, which emits a bundle of sound impulses: the corresponding stripe identifies the volumetric anomalies on the seabed. The Sub Bottom Profiler, exploiting the penetration in the seabed of low frequency sound impulses, detects buried volumetric anomalies. The Multibeam system is a specialized Sonar that produces a high-resolution digital sonographic plan, fitted out with height and georeferenced data of the sea floor, with its volumetric anomalies. Its latest evolution is an AUV, an autonomous ‘fish’ that combines the three functions: Multibeam, Side Scan Sonar and Sub Bottom Profiler. The effectiveness of the Multibeam in the detection of wall remains has been fully tested in the Phlegraean Fields. The map itself does not allow an archaeological interpretation to be put forward but it is nonetheless very useful in effecting direct prospecting and for planning scientific interventions and protection.
From early underwater photomosaic techniques, photogrammetric surveys have developed: through the collimation of stereograms (pairs of stereoscopic frames), taken from a horizontal plane at constant elevation and time intervals, 3D photographic plans of the field are produced. The system is effective, although expensive both in equipment and installation as it requires supports and mechanical looms. Its graphic rendering has evolved from analogue to digital format; with the digital evolution of the whole photographic process, it has been overtaken by the development of digital mapping geometric rectification systems. Early experiments have been conducted by submarines and ROVs (Remotely Operated Vehicle). On the shipwreck in high depth Plage d’Arles 4, the submarine Nautile set spatial and dimensional references (sights and purposes) on the deposit and took up photographic strips: by referencing position and dimension, the digital processing eliminated the distortions of the single frames and, recognizing homologous points, did translate them into photomosaics, photogrammetric models and 3D graphic rendering of the objects.
The system is now available thanks to relatively inexpensive software. Numerous shots can be taken as photographs or as frames from movies acquired in strips above and around the area with freedom of movement and from multiple observation points, even with different orientation: hence the name Structure-from-Motion (SfM). Rapidity, cost effectiveness, and reliability make digital photogrammetry very useful for protection, excavation design and communication purposes. Nonetheless, remote sensing, however effective, may be obscure or misleading in some respects, and the scientific interpretation always requires the underwater archaeologist’s autoptic control. However, in challenging environments – e.g. along the coasts – remote sensing can be considered as a direct survey, in particular on shipwrecks loaded with heavy materials such as large terracotta containers (dolia), stone and marble blocks, carronades, etc. Further help from digital technologies to the documentation of archaeological deposits is offered by GIS platforms. In addition to their use for data management on a coastal environment, they have been experimented successfully in complex contexts characterised by post-classical or modern shipwrecks, in which intra-site GIS techniques allow both stratigraphic recording in layers and spatial and volumetric analysis.
Such technological detection methods meet the new requirements introduced by the Italian Code of Cultural Heritage and Landscape (L.D. 42/2004), which – under art. 10 – defines as archaeological the materials being submerged for at least 100 years. These include the wrecks of World War I and (soon) of World War II: these are large metallic remains for which direct archaeological surveys cannot be scheduled, but which should nevertheless be mapped and their volume identified in order to ensure their protection.
VMAC – 2018




Archeologia subacquea - Come opera l’archeologo sott’acqua. Storie dalle acque (Certosa di Pontignano 1996)